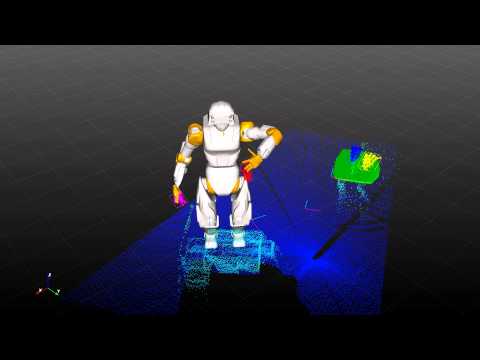
An envisaged planning sequence for the NASA Valkyrie robot. Given the sensed scene, our algorithms plan a hypothetical planning sequence to pick some objects from a table and to drop them into a bucket.
This pairs with the same planning sequence for an Boston Dynamics Atlas Robot:
https://www.youtube.com/watch?v=I6QVl2nR04s
Which can be then demonstrated on the real robot:
https://www.youtube.com/watch?v=xOb5JN9N9PI
The transfer of the PLANNING sequence to the NASA robot could be done with no modification of the original code.
This pairs with the same planning sequence for an Boston Dynamics Atlas Robot:
https://www.youtube.com/watch?v=I6QVl2nR04s
Which can be then demonstrated on the real robot:
https://www.youtube.com/watch?v=xOb5JN9N9PI
The transfer of the PLANNING sequence to the NASA robot could be done with no modification of the original code.
Read more...
No comments:
Post a Comment