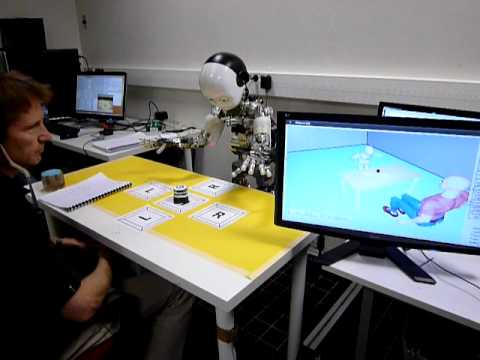
This video shows the user asking the robot to grasp the toy, while at the same time he covers the toy, rendering it invisible. The robot detects that it cannot see the toy and thus cannot perform the grasp. The human then uncovers the toy, it becomes visible (as demonstrated by its appearance in the display of the robot's representation of the workspace), and the robot then grasps it.
http://www.chrisfp7.eu/
The research leading to these results has received funding from the European Community's Information and Communication Technologies Seventh Framework Programme [FP7/2007-2013] under grant agreement n [215805], the CHRIS project.
http://www.chrisfp7.eu/
The research leading to these results has received funding from the European Community's Information and Communication Technologies Seventh Framework Programme [FP7/2007-2013] under grant agreement n [215805], the CHRIS project.
Read more...
No comments:
Post a Comment